خودروهای خودران (AVs) سیستمهای پیچیدهای هستند که برای حرکت در محیطهای غیرقابل پیشبینی جاده طراحی شدهاند. عملکرد یک خودروی خودران را میتوان به کار تیمی از متخصصان تشبیه کرد که هرکدام وظیفهای مشخص و حیاتی بر عهده دارند. این تیم به طور هماهنگ کار میکند تا خودرو را با امنیت و کارایی به مقصد برساند. این بخش به بررسی چهار لایه عملیاتی کلیدی میپردازد که به یک خودرو اجازه میدهد با استفاده از هوش مصنوعی (AI) به تنهایی رانندگی کند.
چهار لایه اصلی عملیاتی: سفر از داده تا تصمیم
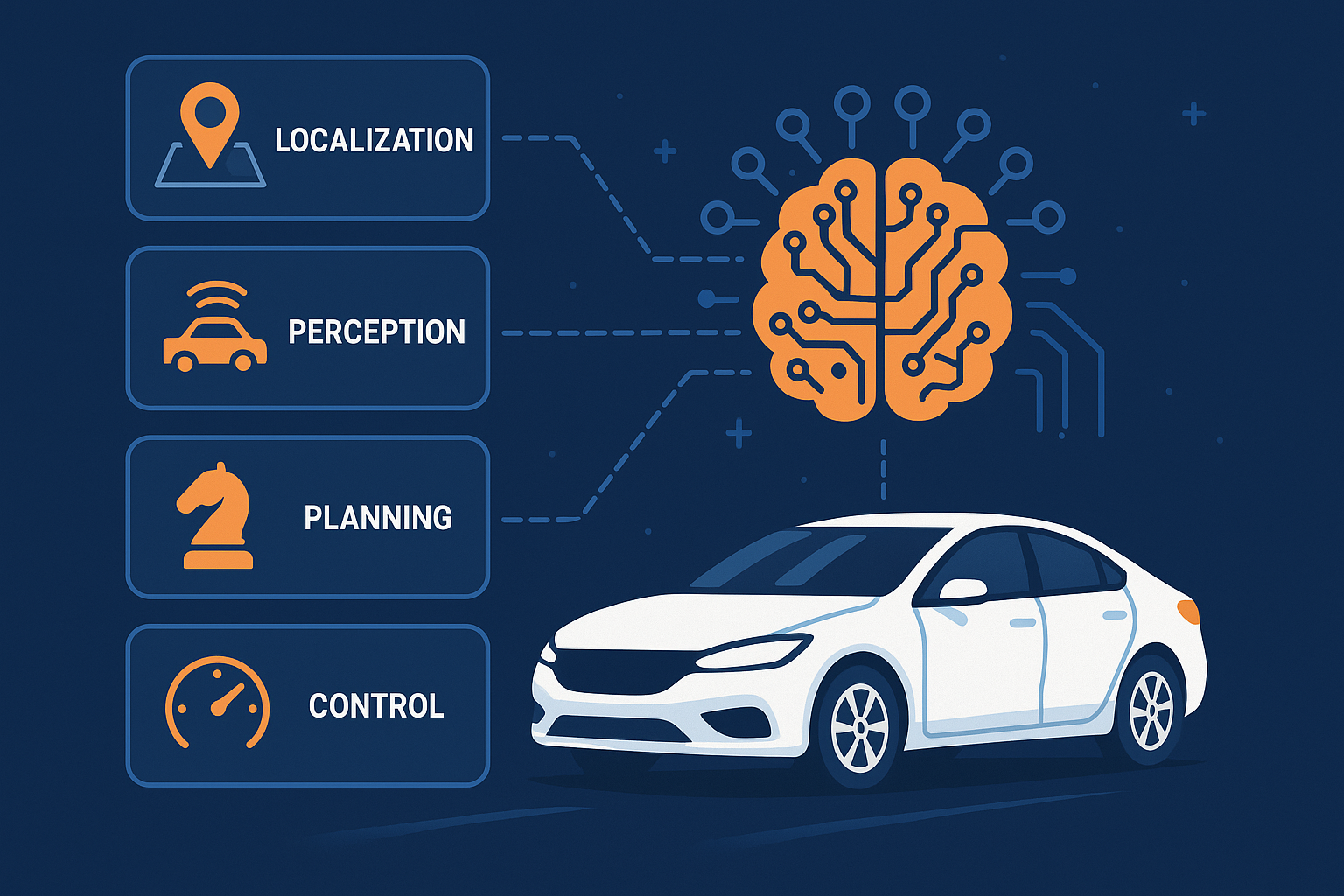
فرآیند «فکر کردن» یک خودروی خودران شباهت زیادی به فرآیند فکری یک راننده انسان دارد: ابتدا باید بدانید دقیقاً کجا هستید، سپس باید ببینید در اطرافتان چه خبر است، بعد تصمیم بگیرید که بهترین حرکت بعدی چیست و در نهایت، آن تصمیم را اجرا کنید. یک خودروی خودران نیز از همین فرآیند چهار مرحلهای، اما با دقتی بسیار بالاتر، پیروی میکند.
📍 لایه اول: موقعیتیابی (Localization) – «من دقیقاً کجا هستم؟»
وظیفه اصلی لایه موقعیتیابی، تعیین « (موقعیت و جهت)» دقیق خودرو نسبت به یک نقشه دیجیتال است. این فرآیند بر «نقشههای با کیفیت بالا» تکیه دارد که نه تنها حاوی جزئیات ثابت مانند علائم راهنمایی و رانندگی و خطکشیها هستند، بلکه با اطلاعات پویای لحظهای مانند وضعیت ترافیک و شرایط آب و هوایی نیز بهروزرسانی میشوند. این ویژگی، نقشه خودرو را به یک سند زنده تبدیل میکند.
لایه دوم: درک محیط (Perception) – «چه چیزهایی در اطراف من است و چه خواهند کرد؟»
این لایه دو وظیفه اصلی بر عهده دارد:
-
شناسایی: تشخیص و تفسیر محتوای پویا در محیط، مانند سایر وسایل نقلیه، دوچرخهسواران و عابران پیاده.
-
پیشبینی: رفتارها و مسیرهای آینده سایر عوامل در جاده را پیشبینی میکند. این فرآیند که «پیشبینی اجتماعی» نامیده میشود، به خودرو کمک میکند تا قوانین نانوشته تعاملات اجتماعی در جاده را درک کند.
لایه سوم: برنامهریزی (Planning) – «بهترین حرکت بعدی من چیست؟»
لایه برنامهریزی اطلاعات را از دو لایه قبلی دریافت میکند: «کجا هستم» و «اطرافم چه خبر است». سپس با استفاده از این دادهها، یک «مسیر و سرعت عملی و روان» برای خودرو طراحی میکند. این فرآیند مانند یک بازیکن شطرنج است که با آگاهی از موقعیت تمام مهرهها، چندین حرکت بعدی خود را برای رسیدن به هدف برنامهریزی میکند.
لایه چهارم: کنترل (Control) – «اجرای حرکت!»
این لایه آخرین مرحله و بخش اجرایی فرآیند است. لایه کنترل، برنامهای که توسط لایه برنامهریزی تعیین شده را به دستورات فیزیکی تبدیل میکند. شامل کنترل طولی (شتاب و ترمز) و کنترل جانبی (فرمان) است تا خودرو دقیقاً در مسیر طراحیشده حرکت کند.
🧠 نقش هوش مصنوعی: چسبی که همه چیز را به هم متصل میکند
هوش مصنوعی نقشی حیاتی در هماهنگسازی این لایهها ایفا میکند، اما میزان تأثیر آن در هر لایه متفاوت است:
| لایه عملیاتی | نقش هوش مصنوعی |
|---|---|
| موقعیتیابی | غالب |
| درک محیط | غالب |
| برنامهریزی | غالب |
| کنترل | کمتر |
هوش مصنوعی نیروی محرکه اصلی در بخشهای کلیدی «فکری» خودرو است و در لایههای تعامل با انسان (HVI) نیز نقش مهمی دارد.
نتیجهگیری: آینده رانندگی هوشمند و قابل اعتماد
هدف نهایی، ایجاد «هوش مصنوعی قابل اعتماد» است؛ سیستمی که هوشمند، ایمن، مقاوم در برابر تهدیدات سایبری، قوی و منصفانه باشد. درک اینکه هر یک از این «متخصصان مجازی» چگونه فکر میکنند، اولین قدم برای ساختن خودروهایی است که آینده رانندگی را متحول و ایمن کنند.